在半导体技术日新月异的今天,高精度、高效率的计量设备成为了推动行业发展的关键力量。半导体3D计量设备,以其卓越的测量精度、自动化程度及数据处理能力,正逐步成为半导体制造领域的核心工具。特别是在半导体前道工艺的监控上有着重要应用,在后道封装上,随着先进封装工艺不断涉及到前道工艺制程,3D测量的重要性也不断提升。
在半导体先进封装工艺中,Bump、RDL、TSV、Wafer合称先进封装的四要素。Bump:金属凸点,起着界面互联和应力缓冲的作用。常见的Bump形状有球状和柱状,也有块状等其他形状,下图所示柱状Bump。
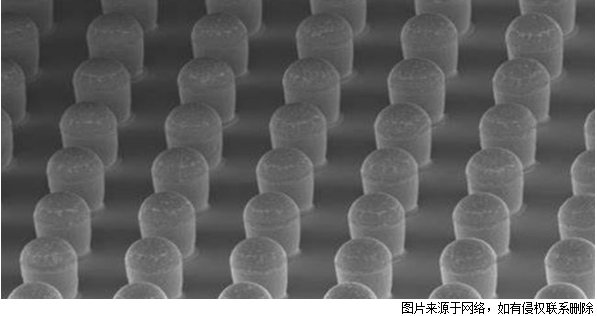
随着先进封装工艺技术的发展,Bump的尺寸也变得越来越小,从最初的100um发展到现在最小的5um,所以对于Bump的量测要求也不断提高,Bump的长宽尺寸,高度均匀性,亚纳米级粗糙度、三维形貌等指标都提出了高精度的测量要求。
为了响应先进封装的工艺要求,对Bump的测量就出现了不同技术路径:比较有代表性的方法有:激光三角法和垂直干涉测量法。今天就Bump的主要测量方法做个介绍。
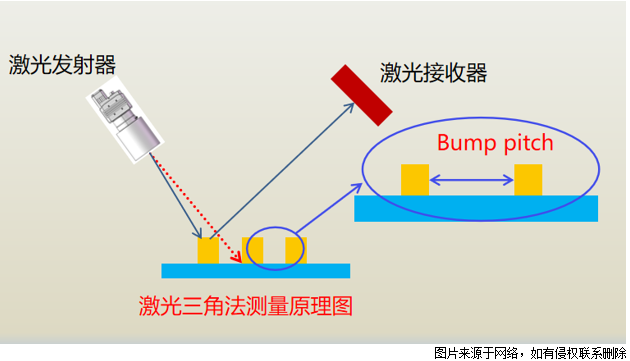
激光三角法
激光三角法测量是一种利用激光进行测距的技术,其基本原理是通过光学反射规律和相似三角形原理来测量物体的距离。该方法通过一束激光以一定的入射角度照射被测目标,激光在目标表面发生反射和散射,然后在另一角度利用透镜对反射激光汇聚成像,光斑成像在电荷耦合器件(CCD)位置传感器上。当被测物体沿激光方向发生移动时,位置传感器上的光斑将产生移动,其位移大小对应被测物体的移动距离,因此可以通过算法设计,由光斑位移距离计算出被测物体与基线的距离值。
优点:高精度:激光三角法测距的精度较高,能够满足大多数商用和民用需求。低成本:相比其他高精度测距方法,如脉冲法和相干法,激光三角法对硬件要求较低,成本也较低。
缺点:从扫描原理图可以看出,激光三角法扫描时,受Bump pitch越来越小的影响,入射阴影会越来越严重,从而影响测量精度,而且最为致命的是Bump pitch却是不断在缩小,因此激光三角法越来越难以应对先进封装的工艺要求。
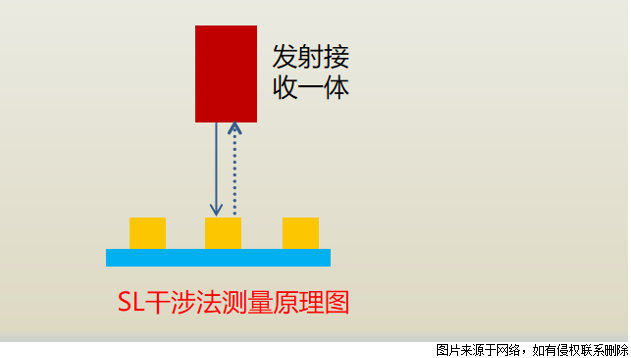
垂直扫描干涉法
垂直扫描干涉法测量的原理:主要基于光的干涉现象。当两列频率相同、相位差恒定、振动方向一致的相干光源相遇时,会产生光的干涉现象。通过特定的测量方法,可以确定物体表面的高度信息。
优点:高精度:干涉测量法可以达到亚微米的测量精度,甚至纳米级别的分辨率,适用于高精度的表面粗糙度测量。高灵敏度:能够捕捉到微小的光斑变化,适用于需要高精度检测的应用场景。最重要的优点是:垂直扫描干涉法,避免了Bump pitch不断缩小产生的阴影测量偏差,符合先进封装Bump工艺的发展方向。
缺点:设备成本高:干涉测量法需要使用高精度的干涉仪等专用设备,这些设备的成本通常较高,增加了整体检测系统的成本。
妙光智能致力于半导体前道工艺的监控和测量,在先进封装领域,妙光智能对标业内一线厂商,提供了Bump高精度测量方案,精确测量Bump的长宽和高度一致性,目前设备已经完成初步验证,不断完善中。
转自:CHICK启科
注:文章版权归原作者所有,本文内容、图片、视频来自网络,仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。