微链道爱专注于
AI 视觉是下一代人工智能机器人研究企业。在视觉大模型、虚拟世界构建、高速 3D 成像、机器人智能运动控制等领域,已经积累丰富的学术和行业经验。DaoAI World 是一个集数据标注、模型训练为一体的AI视觉应用研发团队协作平台,最快半小时内可以训练一个AI视觉应用智能体。
挑 战
下料情景一:
以托盘形式上料,但会因抖动错位,使原来在托盘上的物料离开托盘的位置叠在其他物料上方。需要我们识别出错位的物料及在托盘上的物料。
下料情景二:
从托盘抓到指定位置。需要旋转一定角度后(logo以指定角度码放),放到固定的位置 。
解决方案
-
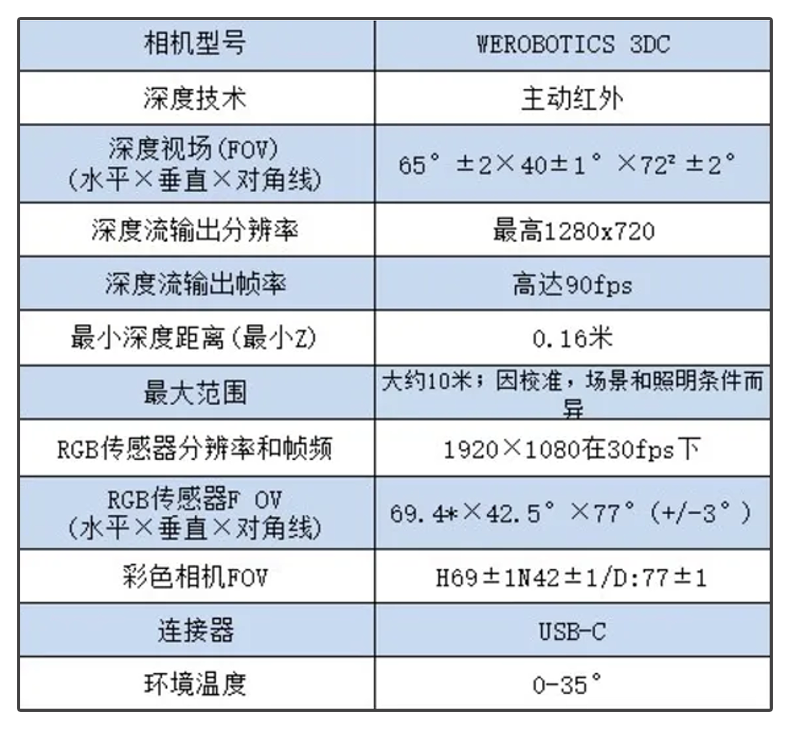
使用3DC mini相机采集3D及2D数据。
-
使用eye to hand方式(相机使用支架固定在来料区上方) 。
-
布置一台工控机来使用vision视觉系统进行点云数据处理。
-
使用4轴机器人抓取。其中会优先抓取散落的开关,将其放在指定位置以供后续下料。
-
视觉与机器人用TCP方式通讯,将物体的位置信息发送给机器人。
-
使用2D进行特征识别(logo方向)。
-
使用3D确定物件空间位置并判断是否重叠。
相机详细参数及外观

方案细节说明
-
机器人末端执行器采用气动吸盘的方式进行抓取。
-
抓取整体节拍为1200个/小时。
-
每个物体的时间在3s左右,(其中机器人运动时间在两秒,视觉时间1s/件)。
-
机器人与视觉采用TCP通讯方式(12位的字符串)。
-
相机以支架方式固定在来料上方。