什么是自动对焦?
自动对焦是指根据物体和视觉系统之间的距离自动调整镜头焦距以保持图像清晰的能力。它是物体光反射的原理,相机上的传感器接收反射光,通过计算机进行处理,并驱动电聚焦装置聚焦。自动对焦技术一般分为两类:主动和被动。
主动式
它是指摄像机上的红外发生器和超声波发生器向被测对象发射红外光或超声波。相机上的接收器接收反射的红外光或超声波进行聚焦,其光学原理类似于三角测距聚焦方法,即测距自动聚焦。
被动式
它是一种直接接收和分析来自物体本身的反射并执行自动对焦的方法。这种自动对焦方法的优点是它不需要点火系统,因此消耗的能量更少,并且对具有一定亮度的物体具有理想的自动对焦效果。通常焦点检测自动对焦。一般来说,被动自动对焦主要用于工业。
如何进行自动对焦
配备有自动对焦功能的系统,通常使用软件搭配自动调焦镜头来调整焦距,镜头在需要对焦的区域前后移动,达到最佳聚焦点会停止自动对焦的动作。自动对焦一般通过测距法(主动式)和焦点检测法(被动式)两种方法调焦。
测距法
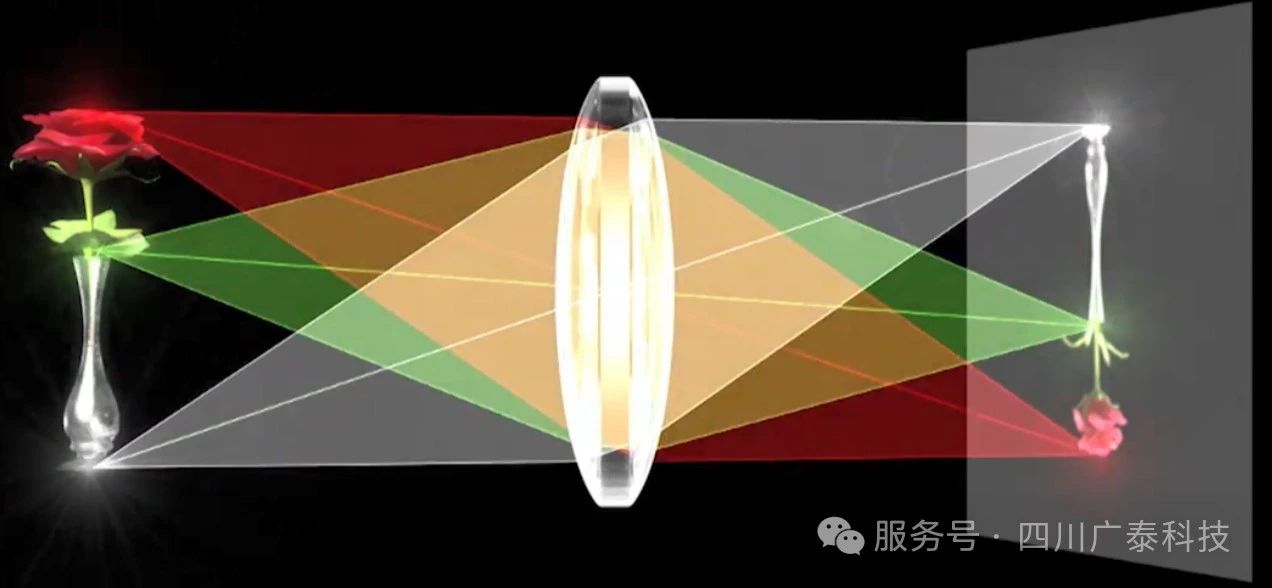
传统对焦技术使用比较广泛的就是测距法,其基本原理就是通过红外、激光或超声波等设备测量目标物体与透镜之间的距离,即物距,再根据高斯成像公式 计算对应的像距,最后调整物距,以此来进行系统的自动对焦。如下公式为理想的光学成像系统模型。设透镜的焦距为f,孔径为D。目标物体要通过透镜能够清晰成像,必须要满足高斯成像公式,表示为:
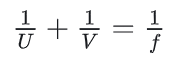
其中, U表示物距,V表示像距。根据高斯成像公式可以知道,当物距U和透镜焦距f的值确定时,目标物体会呈现清晰的成像画面。由于对焦过程需要摄像头主动发射信号,再接收目标物体反射回来的信号,所以该方式存在一个缺点,假如这个信号被目标物体吸收或者散射,那么接收端收到的信号比较微弱甚至接收不到信号,这样就无法准确得到物距,将导致对焦失败。同时,该方法所需要的辅助信号发送接收装置会使整个成像系统的硬件体积增加,能耗变高,且系统复杂度高,易受外界环境干扰。
焦点检测法
焦点检测法主要分两大类:对比度检测法和相位差检测法,视觉检测上用的比较多的是对比度检测法。本文也主要介绍对比度检测法。
1、对比度检测法
对比度是指一幅图像各像素点灰度值从 0 到 255 之间差异的大小。对焦成功的图像对比度最大,图像中物体边缘轮廓最清晰,色彩最生动明艳。基于该原理,在距离焦平面相等的两个位置,分别放置一个传感器,该传感器可以收集图像的对比度信息。然后控制电机移动焦平面,C1和C2得到图像的对比度变化曲线。两条曲线相交的位置,即为正焦位置。
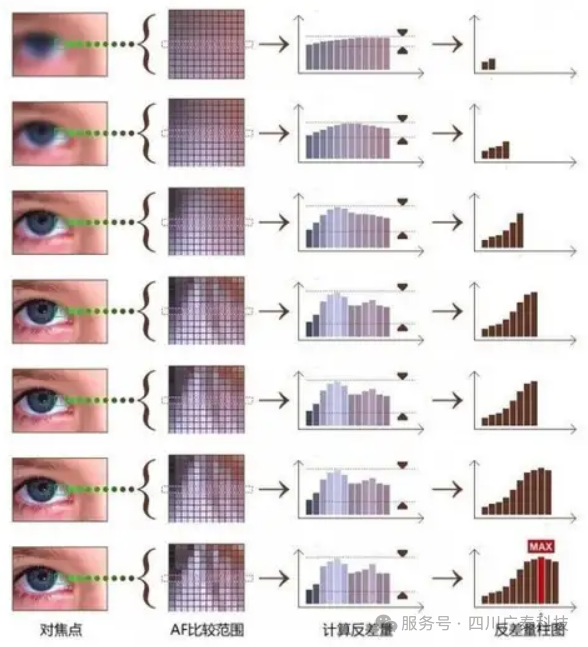
对比度检测法主要基于感光器件及图像处理器,不需要的一个单独的对焦辅助装置,且精度也比测距法来的更高。但因为需要多次采集对比度信息,并多次计算,所以对焦速度较慢。另外,还需要目标物体具备足够的对比度,对于那些纯色或者反差不明显的情况,该方法存在失败的可能。
2、相位检测法
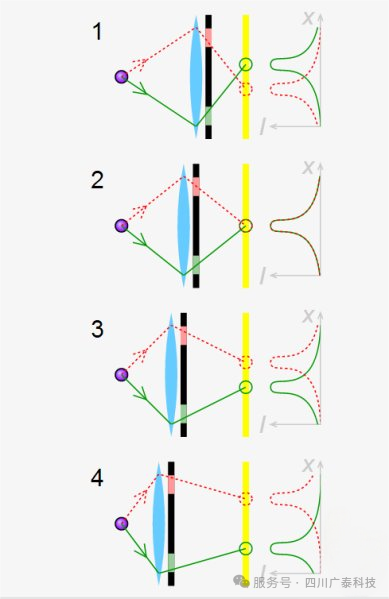
相位检测法是目前单反相机普遍使用的方法,主要依赖检测相位差的自动对焦传感器。如下图,光线被2个或多个带有多个微小透镜的小型图像传感器接收。事实上,现代相位检测设备上的传感器数量远不止两个,而且这些传感器彼此非常靠近。
当光线到达这两个传感器时,如果物体处于对焦状态,则来自镜头最两侧的光线会聚在每个传感器的中心 。两个传感器上都会有相同的图像,表明该物体确实处于合焦状态。
相位检测法
上图的1至4 表示镜头聚焦的情况,黄色为图像传感器,可以看到随着图像传感器和镜头的位置发生相对运动,两两个传感器的曲线之间产生相位差。有一点需要注意,在实际的系统中,最终移动的是镜头而不是传感器。对焦系统通过检测信号波峰的位置,就可以知道偏移的方向,计算出相位差,得出目标的距离, 控制镜头往前或者往后移动, 自动完成对焦。该方法对焦速度快,只需要计算一次就能完成对焦。
近几年,该方法也在手机相机上流行起来,但是由于手机相机模组高度集成,不适合增加单独的对焦传感器,于是人们便直接在手机相机的感光元件上预留出成对的遮蔽像素点来进行相位检测。
与对比度检测法相比较, 相位差检测法[12]对焦过程一步到位,不需要镜头反复运动,但是由于需要 CCD 感光元件上预留的遮蔽像素点来进行相位检测,故而对环境光线要求比较高,较暗的环境下,其对焦效果不理想。
3、混合对焦模式
经过对焦点检测法两大类方法的分析, 我们发现两者优势劣势都较为明显, 现在人们通常是将两者相结合,称之为混合对焦模式,充分发挥两者的优势, 无论对焦精度,还是对焦速度,都得到明显改善,广泛应用于单反相机和手机相机领域。
数字图像对焦法
基于数字图像的对焦技术,主要可以分为两大类:离焦深度法 DFD(Depth From Defocus) 和对焦深度法 DFF(Depth From Focus)。
1、离焦深度法 DFD
离焦深度法DFD是一种通过建立数学模型的方法来实现对焦的方法,其基本思路是通过大量采集离焦的图像,分析图像参数,离焦程度和清晰度的对应关系,从而建立对焦系统的数学模型。利用模型中对应的模糊图像推导出与焦平面的偏移量,然后驱动位移平台移动到焦平面,完成整个对焦过程。这种方法对建立的数学模型精度要求很高,通常只需要采集2到3幅图像即可完成对焦的过程,使得对焦的时间大大缩短。由于这种方法的关键在于对焦前系统已经获取待对焦物体的大量图像信息,一旦待测环境改变,需要重新拟合离焦程度和清晰度的对应关系曲线,对图像信息处理器的性能依赖程度高。
2、对焦深度法 DFE
该方法是一种搜寻正焦平面的方法, 首先通过相机采集一系列图像,然后对获取到的图像,使用图像清晰度算法分析处理后,根据得到的评价值的大小,控制驱动装置带动位移平台,移动到图像清晰度评价曲线的极值点位置,理论上就可以获得最清晰图像,完成整个对焦过程。该方法的对焦速度比离焦深度法慢,但对焦精度比它高。
这两种方式理解起来有点困难,简单来说就是离焦深度方法是从离焦图像中获得模糊程度和深度信息。对焦深度法首先需要一系列模糊程度不同的图像,计算这一系列图像的清晰度评价值,再根据这些评价值,确定合焦位置。
转自:四川广泰科技
注:文章版权归原作者所有,本文内容、图片、视频来自网络,仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。