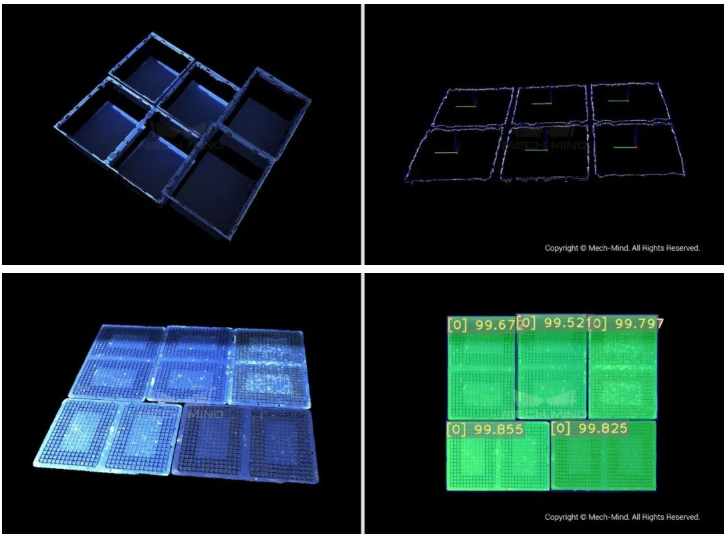
紧密贴合的周转箱正面&底面
点云图及识别结果图,Mech-Eye DEEP @ 2 m
周转箱/料箱是重要的物流周转容器,广泛应用于厂内物流运输、中转、存储等环节。物料在周转过程中,催生了大量周转箱/料箱拆垛需求。
针对复杂多样的周转箱/料箱拆垛场景,梅卡曼德可提供高效、稳定、柔性的AI+3D视觉方案,帮助客户项目快速落地,实现厂内物流自动化升级。
应用难点
箱体情况
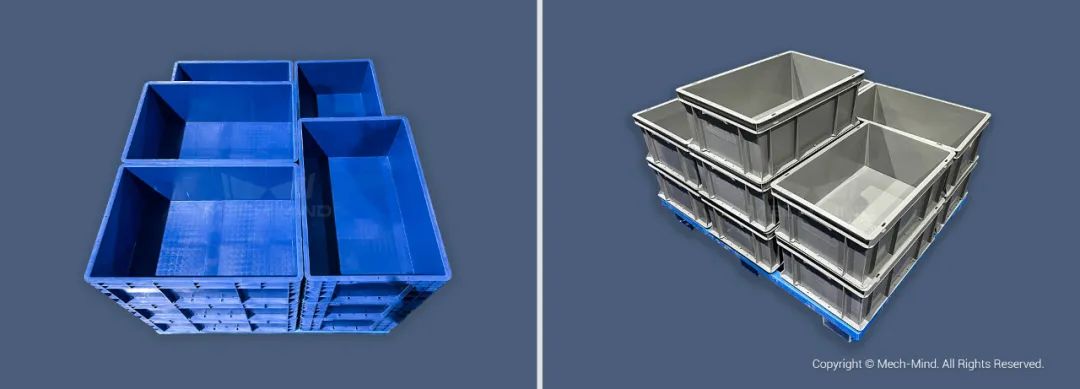
周转箱/料箱为塑料材质,侧壁厚度在2-8 mm不等;长期循环使用易变形,一致性差。对3D视觉系统精度及适应性要求高。
箱内多种物料乱序堆叠,可能存在内容物反光、外溢等情况,对视觉识别造成干扰。
抓取策略(如:外夹、内勾、拖拽式抓取等)需适应箱体侧壁的复杂结构。
来料情况

来料箱体紧密贴合。部分场景,不同大小的周转箱混合堆垛,视觉系统需准确识别箱体长、宽,提前调节夹具行程。
来料垛型不一致、箱体一致性差,机器人拆垛的方式精度低、效率低。
现场挑战
存在同一机器人应对多个工位、厂房顶高限制和机器人臂展不足等情况,需合理规划3D相机安装方式。
现场布局紧凑、对抓取顺序要求严格,视觉系统需具备抓取规划、路径规划、碰撞检测等能力。
存在阳光、灯光等环境光干扰,需要3D相机具备优异的抗环境光性能。
解决方案及优势
方案构成
梅卡曼德3D视觉引导周转箱/料箱拆垛系统由Mech-Eye工业级3D相机、Mech-Vision机器视觉软件、Mech-Viz机器人编程软件构成。

-
周转箱/料箱运输到位,PLC/机器人告知视觉系统进行拍照。
-
Mech-Eye对最高层箱体进行拍照,生成完整、细致、清晰的点云数据;Mech-Vision对点云进行处理(点云预处理、模板匹配、位姿矫正等),输出位姿,并根据需求进行箱体尺寸计算、垛型校验;Mech-Viz获取箱体位姿,进行碰撞检测、规划抓取,引导机器人执行拆垛作业。
-
直到整垛拆完,视觉系统上报拆垛完成信号,等待加料。
方案优势
无惧各类复杂环境 成像清晰完整
-
先进的成像算法,Mech-Eye在典型厂房环境光干扰下(15000 lx-20000 lx),能够对壁薄的周转箱/料箱高质量成像。
-
Mech-Eye多种型号,支持远/中/近不同工作距离;体积紧凑,满足复杂多样的安装环境。梅卡曼德能够根据实际工况为客户提供契合的3D相机及安装方案。确保相机视野完整覆盖拍照区域,点云清晰完整。
先进AI算法 应对各种来料形态
-
先进点云处理算法,快速准确输出箱体位姿,引导机器人精准抓取。
-
性能强大的机器视觉软件,内置AI算法可应对紧密贴合、一致性差、底面朝上的箱体。内容物反光、外溢等情况亦不影响识别。
智能程度高 物料周转更稳定
-
可根据来料垛型,智能规划抓取顺序及单次抓取数量。
-
智能碰撞检测及运动轨迹规划,更好应对现场布局紧凑等问题,提升厂内物料流通稳定性。
-
精确识别箱体长、宽,根据识别结果计算箱体尺寸,调节夹具行程;多抓时,视觉系统对箱体间距进行判断,小于设定阈值时报警,避免碰撞发生。
(文章转自网络,如有侵权,请联系删除)