Allied Vision 3D相机助力Kudan智能化应用
同时定位与地图构建(SLAM) 是机器人自主导航及了解所处位置和周边环境的基础技术。这是一项至关重要的技术,可确保自动驾驶汽车和无人机等移动机器人在未知或动态环境中运行。
SLAM算法融合了3D深度相机、2D或3D LiDAR和惯性测量装置等传感器数据,可帮助机器人构建连贯的环境地图,并不断更新地图位置。
Kudan作为SLAM行业的先驱,名下研发的Grand SLAM软件现已支持Allied Vision Nerian Ruby 3D深度相机,可作为Kudan自主移动机器人开发套件的一部分。
关于Kudan
Kudan于2011年在英国布里斯托尔成立,是商业级同时定位和地图构建(SLAM)技术先驱者。作为全球领先的独立SLAM公司,Kudan 提供专有算法,利用先进的计算机视觉、人工智能和传感器融合技术,实现精密、可靠且节能的定位和地图构建。
Kudan Grand SLAM是什么?
Kudan Grand SLAM 是由Kudan开发的软件,用于帮助移动机器人和车辆了解自身位置、移动方式,并在动态和复杂情况下构建室内外环境。该软件既支持灵活的传感器设置,又可提供各种行业和应用(包括关键任务系统)所需的可靠性能。
Kudan Grand SLAM的主要特点包括:
-
在自主移动(Autonomous Mobility)相关产品开发过程中,支持快速集成及顺利开展功能和性能评估
-
独有的传感器融合技术,通过相机(视觉)、2D/3D 激光雷达单独或组合支持厘米级标测和定位精度
-
SLAM基于AI算法,可稳定适应场景变化和动态物体
-
快速、稳健的地图构建流程及地图处理功能,支持高性价比大规模系统部署和运营
-
支持跨平台,可实现广泛的硬件架构和硬件加速
-
从边缘设备到中央云平台,SLAM软件部署选项灵活
结合Kudan Grand SLAM的移动机器人开发套件 —MRDK
Kudan移动机器人开发套件 (MRDK)是一套软硬件集成套件,旨在通过先进的导航技术(包括Kudan Grand SLAM)缩短产品开发周期。此套件基于可更换组件的模块化架构,允许客户根据需要验证更优的传感器设置和自有技术组件。
Kudan MRDK的一些关键特性包括:
-
支持快速集成并顺利开展功能和性能评估
-
可与客户自有移动机器人硬件底座集成,或随附符合ROS标准的移动机器人底座
-
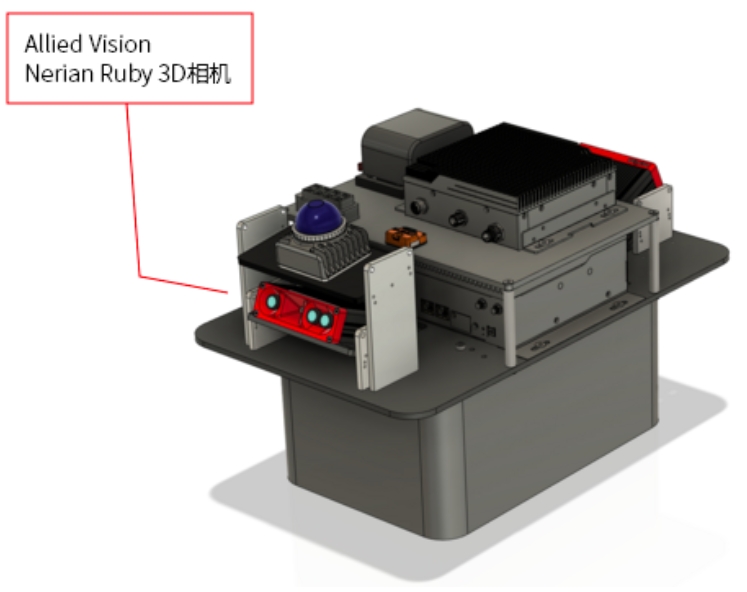
由一或两台Ruby 3D相机、一个工业级计算设备和一个时间同步装置组成,可实现可靠的数据处理2D/3D-LiDAR、独立IMU和RTK-GNSS传感器模块可作为可选组件
-
支持多芯片组架构,兼容X86 和 Arm/Jetson
-
支持ROS,包括ROS1和ROS2
Kudan MRDK 移动机器人开发套件
软件与硬件的成熟契合
Allied Vision Nerian Ruby 3D深度相机与Kudan Grand SLAM是一次硬件与软件集成方案的成功案例。通过软件与硬件的协同支持,实现了如MRDK自动移动机器人开发套件等应用产品的实际落地,为智能应用产品的发展贡献了重要的基础。
Nerian Ruby 3D深度相机融合了自主机器人导航所需的所有硬件和视觉功能:
-
一台设备内置两台相机:RGB图像和3D深度数据点云
-
兼容传感器数据融合
-
帧率高达60 fps
-
集成定向IMU,无需额外的硬件
-
多相机时间同步
-
低能耗
-
稳定校准且在运行时自动重新校准

Kudan Grand SLAM

Nerian Rudy 3D相机
工业相机的无限可能
工业相机的应用场景是多种多样的,从物流到医疗保健,从智能交通到农业,从食品卫生到半导体制造,涵盖了大部分领域。
Allied Vision 的模块化概念(Modular Concept)能够最大程度地满足不同行业客户的需求,为其定制最适合的视觉方案,实现各种应用的最佳性能。
我们对于Kudan最终选择Allied Vision相机作为合作伙伴感到非常荣幸。这是对我们技术和产品的肯定,也是对我们长期致力于为客户提供卓越解决方案的认可。
我们期待与Kudan携手,共同探索更多相机应用场景的可能性,共同推动智能化技术的发展。作为Allied Vision, 我们将不断创新、改进,与客户一同前行,共同实现共赢。
转自:Allied Vision工业相机
注:文章版权归原作者所有,本文仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。