1.详解轨道交通相关客户需求
多线激光的3D测量技术
通过多组线激光,多组面阵相机联合标定,组合成完整的系统。一次性实现多组测量。同时通过2D图像对于轮圈边缘信息进行图像处理,同时进行测量。以此来同线激光的检测结果进行融合和比对。
高帧率相机的动态物体3D成像技术
-
相机标定
-
成像
-
多相机联合标定
-
噪声抑制、图像滤波等
-
3D图像分析
双目相机的轮对踏面缺陷检测技术

使用人工智能技术,通过图片对缺陷进行有效的检测。双目相机可以通过联合标定,形成时差来还原深度信息,但是对于物体表面的纹理有比较高的需求。在列车运行过程中,通过多组相机进行高速拍摄,分析缺陷部位。
轮对外形尺寸检测
轮对几何尺寸测量(轮缘厚度、轮缘高度、轮径、Qr 值、内侧距、不圆度)和轮对踏面监测报警(踏面擦伤、剥离)。

激光位移传感器使用三角测量法对检测物位移、平整度、厚度、振动、距离、直径等几何量进行高精度测量。
2.微链WeRobotics高速线激光相机
技术难点解析
防震(如图所示,需要特殊的相机架设方式)
抗环境光干扰(侧面和上面,采用强激光方式)
软件算法:在复杂的环境以及列车运动过程中,生成持续、可靠、稳定的点云信息。

微链WeRobotics高速线激光相机

系统组成
-
安装微链3D视觉系统单元
-
编制程序,与现场机器人建立通讯
-
系统联调
-
试运行后交付
3.微链为您提供配套解决方案
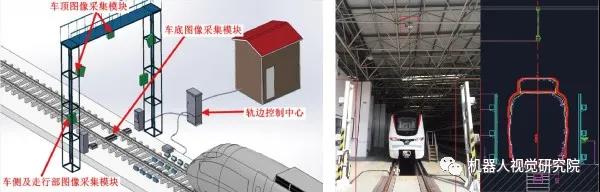
列车车体360°检测
通过多组线激光,多组面阵相机联合标定,组合成完整的系统。一次性实现多组测量。同时通过2D图像对于轮圈边缘信息进行图像处理,同时进行测量。以此来同线激光的检测结果进行融合和比对。
自动检测
系统采用全自动操作,无需人工干预,减小人员工作量。
车底快速检测

系统采用滑轨搭载机械臂作业,用于扫描动车组底部可视部件,给予系统更大柔性空间。
精确定位功能
通过快速滑行到停止位及机械手精准控制,可准确拍摄待测部位,精度可达到1mm。
(文章转载自网络,如有侵权,请联系删除)