在使用视觉引导机器人来处理分拣任务的工业场景中,金属等表面有光泽物体会给视觉系统带来巨大挑战,因为表面有光泽物体引起的反射光会使3D视觉图像处理中出现伪影,从而导致物体定位错误。
因此,如果要在自动化工厂中使用机器人,就必须确保其视觉系统能正确识别物体,以实现准确的箱盒取物。
Nak3D · 方案简析
Euclid Labs 是一家来自意大利的软件公司,可提供完整的基于3D视觉技术的软件解决方案,并已自行开发制造出一套名为 Nak3D 的3D工业立体视觉系统。
Nak3D 由两台Basler acA1920-155um 相机和一个红色激光器组成。配备USB 3.0 接口的Basler acA1920-155um相机采用Sony IMX174 CMOS 芯片,可在230万像素的分辨率下提供164 fps 的帧速率,对红色激光束的反应极为灵敏。
Nak3D · 功能解析
Euclid Labs 成功将相机和激光器集成到同一个可靠的立体视觉系统中:两台相机和控制激光旋转的电机均连接至PC,该PC负责逐一扫描并收集来自两台相机的图像以及激光位置。Euclid Labs 软件套装会在外部视觉PC上对所获取的3D数据进行处理和可视化。

Nak3D 扫描仪
使用2台ace相机和1个红色激光器来引导机器人
系统的工作原理:
1、移动激光束
2、使用两台相机拍摄图像
3、执行全立体分析以及处理第一张点云
4、过滤点云,仅接受位于激光平面上的点(将激光束用作过滤器)
5、向最终点云中添加可靠的点
6、转到步骤1继续处理,直到激光位置达到扫描体积的末端
当Nak3D 系统连接到Euclid Labs 的软件套装进行箱盒取物分拣时,软件会从点云开始,识别物件并详细描述拾取物件时所产生的移动轨迹。
Nak3D 具有各种尺寸可供选择,以适应不同的扫描体积,也可以定制具有较细激光束的特殊版本,以便识别尺寸仅为几毫米的物体。
方案优势
将立体视觉技术与激光束结合,自动过滤点云中的伪影,让整个系统能够精确地为表面有光泽的物体构建3D图像。因此,与其它技术相比,Nak3D 系统对反光物体格外有效。
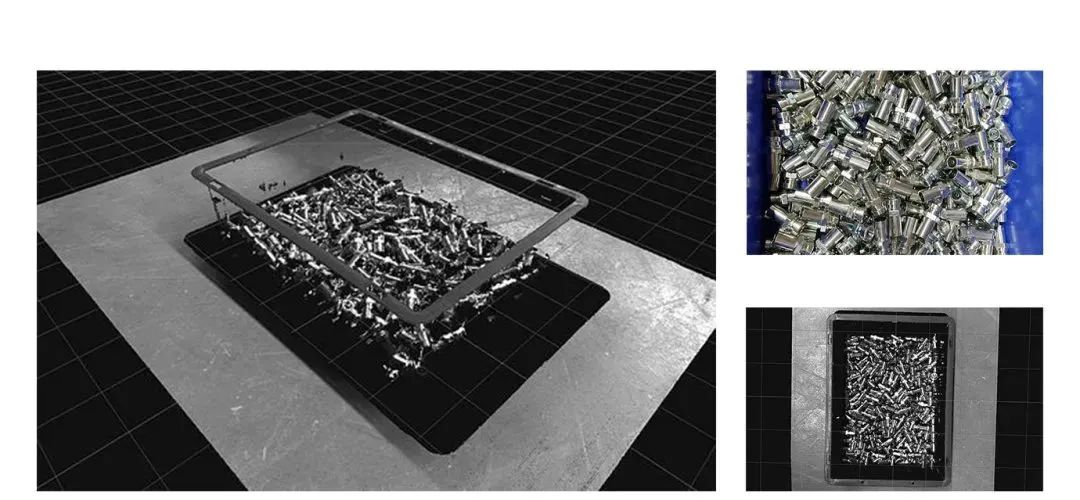
使用Nak3D 为表面有光泽物体采集点云的示例
Euclid Labs 强大的Nak3D 视觉系统,可精确地从物料盒随机分拣金属和表面有光泽的部件,并将其装载到机器或传送机中供进一步处理。
与结构光产品相比,这个解决方案具备更高的成本效益,它为机器人制造商、机器制造商和系统集成商提供了更好的选择,让他们能根据市场要求,为具有挑战性的应用任务打造更合适的箱盒取物分拣解决方案。
(文章转自网络,如有侵权,请联系删除)