当一家大型汽车原始设备制造商在其生产线上的装配过程中需要以更小,更具成本效益的外形尺寸进行机器人引导时,Recognition Robotics(美国俄亥俄州Elyria; www.recognitionrobotics.com)开发了其先前的改进版本 -发布机器人指导产品。
2012年,Recognition Robotics推出了Robeye机器人引导解决方案,旨在模仿人类看到的方式。该系统使用连接到机器人手臂的工业相机来捕获机器人将引导的部件的图像,并且单独的工业计算机处理图像并与机器人的控制器通信。
最近,汽车客户要求系统具有更小的占地面积,更低的成本以及更简单的设置和操作。为了提供机器人手臂的视觉指导,用于在车辆装配过程的白车身部件中对汽车车身面板进行脱轨并将其放置在车辆上,识别机器人与ADLINK Technology合作,开发一种名为Robeye All-In-One或RAIO的改良版Robeye。
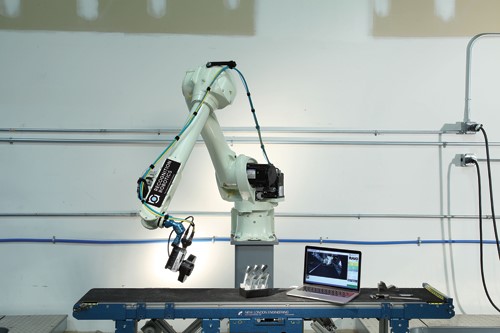
RAIO相机采用ADLINK NEON-1020智能相机,配备来自ams Sensors Belgium(CMOSIS,安特卫普,比利时; www.cmosis.com)的2 MPixel CMV2000 CMOS图像传感器。该传感器的像素尺寸为5.5μm,帧速率为120 fps。凌华科技的智能相机还采用了Intel Atom四核处理器E3845 1.91GHz,这是一款FPGA协处理器,可在Windows或Linux上运行。据ADLINK称,这种架构减少了Robeye产品的占地面积,并提供了IP67级别的“独立视觉识别和引导系统”。
在机器人视觉引导系统中应用了识别机器人的视觉算法。根据识别机器人技术,算法处理的图像类似于人类视觉皮层的功能。从单个2D图像,系统可以识别零件并返回关于机器人用户框架内零件方向的X,Y,Z,Rx,Ry和Rz位置信息。利用该数据,机器人然后能够利用该部分在空间中的当前位置的校正的偏移数据来更新预编程的路径。